Publications
UGE-MPC
Uncertainty-Guided Exploration for Model Predictive Control in robotics.
ICRA 2026Robotic Sensor Network Lab · The University of Texas at Austin · University of Minnesota
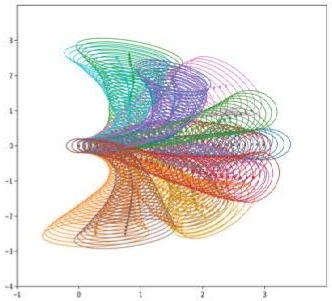
View Publications ↓C-Uniformity is a new notion for sampling robot trajectories where we seek to generate trajectories with the following property: Let \( L(t) \) be the set of configurations reachable by the robot in time \( t \). C-uniform trajectories are a collection of trajectories such that, for each \( t \), configurations in \( L(t) \) are sampled uniformly at random.
General Methodology: We generate level sets by densely sampling control inputs and tiling \( \delta \)-measure regions over each level set. To compute the action probabilities, a flow network is generated whose maximum-flow yields C-Uniformity.
UGE-MPC
Uncertainty-Guided Exploration for Model Predictive Control in robotics.
ICRA 2026